Robot motor control principle
Robots are increasingly used in applications and play an important role in industrial production and improving efficiency. Industrial robots mainly use servo motors for motion control to move and grab tools. This article will discuss in detail the characteristics of servo motors and the corresponding control principles of different types of servo motors.
Motion control principles
Motion control is closely related to robotics. Robots in industrial applications must use actuators composed of various motors to move on their own to perform tasks or grab tools through robot arms.
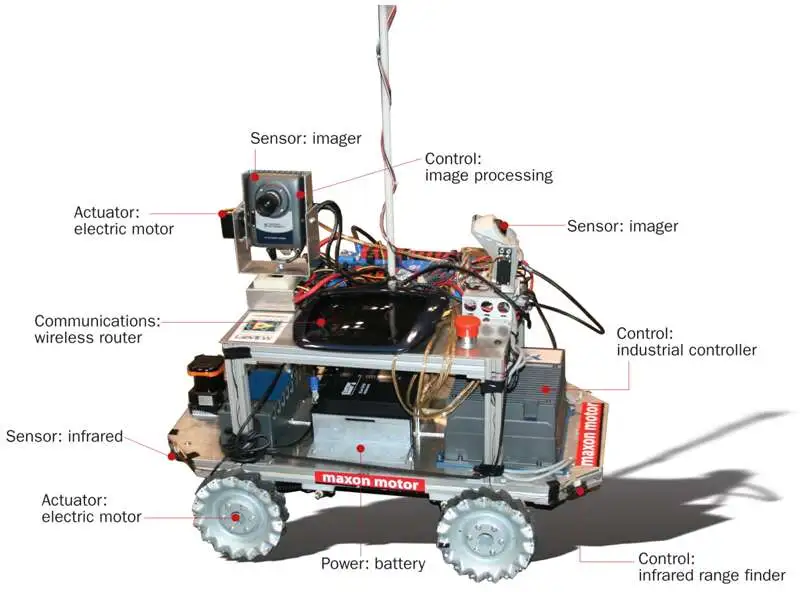
The robot's motion control system usually consists of a motor controller, a motor driver, and a motor body (mostly servo motors). The motor controller has intelligent computing functions and can send instructions to drive the motor. The driver can provide boost current to drive the motor according to the controller instructions. The motor can move the robot directly, or it can move the robot through a transmission system or a chain system.
Output type
Mobile robots are often used to explore large areas of land and can move using a variety of propellers, robotic feet, wheels, tracks or robotic arms. For example, various NI display platforms include VINI, VolksBot and Isadora. These robots use Mecanum wheels, general wheels and robot arms respectively. For embedded control, real-time controllers and FPGAs can be integrated through embedded platforms such as NI CompactRIO. CompactRIO also includes a reconfigurable chassis that can accommodate a variety of I/O configurations, including sensor input and motor control.
VINI is a robot platform that uses omnidirectional wheels and can travel in multiple directions. In addition to moving forward and backward like a traditional wheel, the omnidirectional wheel can also rotate the wheel axis in the opposite direction and travel in any direction. This type of wheel is already commonly used in applications such as automatic forklifts that must be able to move in tight spaces.
VINI is also a map drawing robot that performs path planning and data processing through NI industrial-grade controllers and CompactRIO. An embedded industrial-grade controller provides the laser scan map and performs machine vision processing, allowing the CompactRIO to receive sensor data and control servo motors on the camera system.

The wheels on VolksBot were developed by the Fraunhofer Institute in Germany.
Isadora is a dancing humanoid robot that uses humans to operate a smaller version of the robot to obtain input data. Then he began to move his robotic arms and torso to imitate the movements of a smaller version of the robot. Isadora uses two sets of CompactRIO, one of which is used to simulate the recorded motion, and the other is to allow the robot to reproduce the motion trajectory.
Servo motor control principles and types
Servo motor is a common type of motor in robot applications. Its basic control principle is to use a control loop and combine it with necessary motor feedback to help the motor enter the required state, such as position and speed. Because servo motors must understand the current state through the control loop, their stability is higher than that of stepper motors.
There are different types of servo motors – brushed and brushless. The difference between brushed servo motors and brushless servo motors is their communication mechanism. The working principle of a servo motor is to move or create torque based on reverse magnetic force. The simplest examples are stationary magnetic fields and rotating magnetic fields. Simply changing the direction of the current flowing through the magnetic field changes the magnetic poles and causes the magnetic poles (rotor) to start rotating. Changing the direction of the current in the coil is called commutation.
Brush servo motor
The control principle of a brushed servo motor is to change the current in the motor coil through a mechanical brush. Because brushed motors can change the direction of incoming current, they can be powered by direct current power supplies (DC). Brushed servo motors can be divided into 2 groups of parts:
- The motor casing has a field magnet, that is, a stator.
- The rotor is composed of a coil with an iron core in the middle and is connected to a current transformer
The brushes contact the current transformer and direct the current into the coil. After a period of use, the brushes can wear out and create friction in the system; this does not happen with brushless servo motors.
Brushless servo motor
Most brushless servo motors operate on alternating current power (AC). The control principle of brushless servo motors is to put the iron core on the outside. While the rotor becomes a temporary magnet, the stator becomes a wound iron coil. The current in the external circuit will be reversed at a given rotor position. Therefore, this servo motor is driven by alternating current. Of course, there are also brushless DC servo motors. These motors typically have some electronic switching circuitry that converts the incoming DC. Brushless servo motors are more expensive, but have less wear problems.
stepper motor
In robot motion applications,
stepper motors are not as popular as servo motors, but they are still an important type of motor and are easier to use. Compared with servo motors, stepper motors are slower and more precise. The stepper motor has a series of built-in brushless teeth. After the current passes through and changes the electromagnetic charge, the next set of brush teeth pulls the rotor, and the previous set of brush teeth pushes the rotor, thus forming a stepper motor. power ups. Compared with servo motors, since stepper motors can be accurately controlled by the number of brush teeth (that is, equal to the distance moved), feedback is generally not required. However, brushing teeth may be missed due to obstacles, so an encoder can be used as feedback.
Motion controller and software architecture
Many manufacturers have built their own drive systems to control robots. When considering motion control systems in robot applications, you can first understand the rudimentary mesh cycle, as shown in the figure below.
 2024-08-30 16:01:40
Engineering
2024-08-30 16:01:40
Engineering
 2024-07-26 14:09:13
Engineering
2024-07-26 14:09:13
Engineering
 2024-07-18 09:42:00
Engineering
2024-07-18 09:42:00
Engineering
